Como Configurar o Position Hold e Altitude Hold no Betaflight
Imagine a seguinte cena: você está no meio de um voo FPV, a bateria ainda tem carga, mas alguém se aproxima para conversar. Você precisa tirar os óculos, largar o rádio por um instante e simplesmente parar o drone no ar. Até pouco tempo, isso era exclusividade dos drones DJI. Agora, com o Position Hold e o Altitude Hold do Betaflight, o seu drone FPV de corrida ou cinewhoop pode manter a posição sozinho enquanto você respira, toma uma água ou resolve qualquer situação no solo. Eu testei essa funcionalidade extensivamente e posso dizer: funciona, mas tem nuances que você precisa entender antes de sair ativando.
O Que Sao Position Hold e Altitude Hold no Betaflight
O Altitude Hold (manutenção de altitude) é um modo de voo que trava automaticamente a altura do drone. Quando ativado, o throttle centralizado mantém a altitude fixa, e você só precisa se preocupar com pitch e roll. Já o Position Hold vai além: ele mantém não apenas a altura, mas também a posição horizontal do drone usando dados de GPS. O drone fica “parado no ar”, como se estivesse ancorado em um ponto invisível.
Esses dois modos foram introduzidos na versão 2025.12 do Betaflight e representam um salto enorme para o ecossistema FPV. Antes, se você quisesse algo parecido, precisava migrar para o iNav ou usar um drone DJI. Agora, o Betaflight incorpora essa capacidade de forma nativa.
Diferença prática entre os dois modos
- Altitude Hold (ALTHOLD): mantém a altitude, mas o drone ainda deriva lateralmente com o vento ou por imprecisão de sensores. Você corrige com os sticks de pitch e roll.
- Position Hold (POSH): mantém altitude e posição horizontal. O drone tenta ficar parado no ponto exato onde você ativou o modo.
Na prática, a recomendação é usar os dois juntos, ativados pelo mesmo switch no rádio.
Hardware Necessario para Position Hold e Altitude Hold
Para usar esses modos de voo, o requisito mínimo é simples: um módulo GPS conectado à sua controladora de voo. Barômetro e magnetômetro (bússola) são opcionais, mas cada um traz vantagens importantes.
Módulo GPS
O GPS é obrigatório. Ele fornece as coordenadas de posição e também dados de altitude. Sem GPS, nenhum dos dois modos funciona.
Barômetro
Muitas flight controllers modernas já vêm com barômetro integrado. Ele mede a pressão atmosférica para estimar a altitude com mais precisão e velocidade do que o GPS. Se a sua controladora não tem barômetro, o Position Hold ainda funciona, porque o GPS também fornece dados de altitude, mas a estabilidade vertical não será tão precisa.
Um detalhe importante: se você aplicar conformal coating (revestimento conformal) na placa para proteção contra umidade, nunca cubra o barômetro. Isso causa leituras de altitude completamente erradas.
Magnetômetro (Bússola)
Alguns módulos GPS vêm com um magnetômetro integrado, também chamado de bússola. Ele ajuda o Betaflight a saber a direção para a qual o drone está apontando (heading), o que melhora a precisão do Position Hold.
| Componente | Obrigatório? | Benefício |
|---|---|---|
| Módulo GPS | Sim | Fornece posição e altitude via satélites |
| Barômetro | Não | Altitude mais precisa e responsiva |
| Magnetômetro | Não | Heading imediato, Position Hold disponível logo após decolagem |
Voce Realmente Precisa de Magnetometro
Essa é uma dúvida que eu tinha antes de testar, e a resposta curta é: depende do seu uso.
Eu testei o Position Hold com e sem bússola, e a diferença de desempenho não foi tão dramática quanto eu esperava. Sem bússola, o drone manteve posição e heading de forma estável por quase 8 minutos, que é mais do que a maioria das baterias dura.
Vantagens de usar com bússola
- Você pode ativar o Position Hold imediatamente após a decolagem
- O heading se mantém mais preciso durante todo o voo
- Não precisa voar em linha reta antes de ativar
Desvantagens de usar com bússola
- A calibração é trabalhosa e precisa ser refeita em locais diferentes
- Uma calibração malfeita pode piorar o desempenho em vez de melhorar
- Adiciona complexidade à montagem
Sem bússola
- Você precisa voar em linha reta por alguns segundos (aproximadamente 100 metros) antes de ativar o Position Hold
- O Betaflight usa o giroscópio para rastrear o heading, que pode derivar lentamente ao longo do tempo
- Se o heading começar a derivar, basta desativar, voar reto novamente e reativar
Na minha experiência, para a maioria dos pilotos que vão usar o Position Hold ocasionalmente, como em emergências ou para descansar durante um voo long range, o GPS sem bússola já é suficiente. Se você pretende usar o recurso com frequência e quer o melhor desempenho possível, considere investir em um módulo GPS com magnetômetro.
Cada drone quebrado sem aprendizado real é dinheiro jogado fora. Aprenda a voar FPV do jeito certo antes do próximo voo.
Onde Montar o GPS no Drone FPV
A posição do módulo GPS no frame é crucial para a qualidade do sinal. O GPS deve ficar o mais longe possível de fontes de interferência eletromagnética.
Fontes de interferência a evitar
- Antenas de VTX (transmissor de vídeo)
- ESC, motores e fios de motor
- Cabos de alimentação (como o conector XT60)
- Action cameras (GoPro e similares)
Locais recomendados para montagem
- Acima da câmera FPV: posição elevada, distante dos motores
- Na parte traseira do drone: desde que não fique muito perto das antenas de VTX
- Na cinta de bateria: solução prática e funcional
A ideia é sempre buscar a posição mais alta e mais afastada dos componentes eletrônicos de potência.
Como Conectar o GPS na Flight Controller
A conexão elétrica do GPS é direta. Você precisa de uma UART (porta serial) disponível na controladora de voo.
Pinagem de conexão
- GPS RX conecta no FC TX
- GPS TX conecta no FC RX
- GPS 5V conecta no FC 5V
- GPS GND conecta no FC GND
- GPS SDA conecta no FC SDA (somente se tiver bússola)
- GPS SCL conecta no FC SCL (somente se tiver bússola)
Um ponto importante: nunca use SoftSerial para conectar o GPS. O SoftSerial é limitado a 19200 baud, velocidade insuficiente para o GPS funcionar com confiabilidade, especialmente para recursos como Rescue Mode e Position Hold. Sempre use uma UART de hardware.
Configuracao Completa no Betaflight
Atualizando o firmware
Primeiro, atualize o Betaflight para a versão 2025.12 ou mais recente. Use obrigatoriamente o configurador web em app.betaflight.com, e não o aplicativo desktop antigo.
Na tela de Build Options, certifique-se de que as seguintes opções estão habilitadas:
- Altitude Hold
- Position Hold
- GPS
- Magnetometer (apenas se estiver usando bússola)
Configurando a aba Ports
Na aba Ports do Betaflight Configurator, habilite o GPS na UART onde o módulo está conectado.
Configurando a aba Configuration
Ative os seguintes sensores:
- Accelerometer: obrigatório, deve estar sempre ativado
- Barometer: ative se a sua controladora tiver um
- Magnetometer: ative se estiver usando bússola
Se você não está usando magnetômetro, entre no CLI e digite:
set pos_hold_without_mag = ON
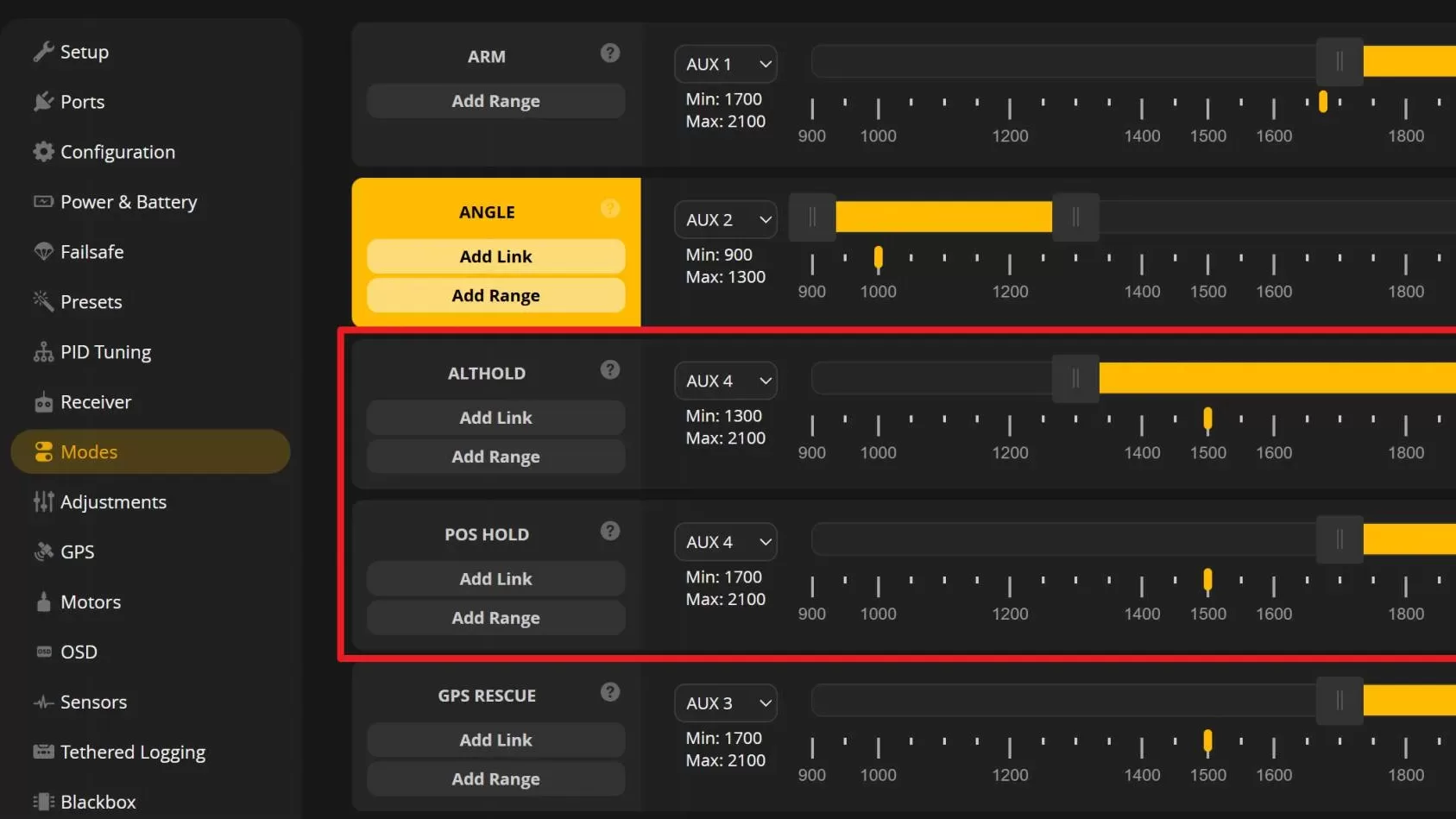
saveConfigurando a aba Modes
A recomendação é vincular o Altitude Hold e o Position Hold ao mesmo switch de 3 posições:
- Posição 1: ambos os modos desligados (voo normal)
- Posição 2: apenas Altitude Hold ativo
- Posição 3: Altitude Hold + Position Hold ativos
Essa configuração permite testar o Altitude Hold isoladamente antes de ativar o Position Hold.
Configurando o OSD
Na aba OSD, ative o indicador Fly Mode para visualizar claramente qual modo está ativo durante o voo. Ative também a seta Home Direction, que é muito útil para validar o heading, especialmente se você voa sem bússola.
Ajustando o Hover Throttle
No CLI, defina o valor de throttle de hover:
set ap_hover_throttle = 1275
saveSubstitua 1275 pelo valor real de hover do seu drone. Se o valor for muito baixo, o drone cai quando o Altitude Hold é ativado. Se for muito alto, ele sobe. Você pode ajustar esse valor pelo menu OSD em GPS Rescue ou diretamente no CLI com o parâmetro ap_hover_throttle.
Calibracao do Acelerometro e Magnetometro
Acelerômetro
Tanto o Position Hold quanto o Altitude Hold dependem do Angle Mode, que usa o acelerômetro. Calibre antes de voar.
- Coloque o drone em uma superfície plana e nivelada
- Vá até a aba Setup no Betaflight Configurator
- Clique em Calibrate Accelerometer
Após calibrar, teste o Angle Mode em um hover. Se o drone derivar para algum lado, use os trim commands dos sticks para compensar:
- Drone deriva para a esquerda: Trim ACC Right
- Drone deriva para trás: Trim ACC Forward
Eliminar 100% da deriva é quase impossível. O objetivo é minimizar ao máximo.
Magnetômetro
Se você estiver usando bússola, a calibração do magnetômetro é um processo separado e mais trabalhoso. Recomendo que você siga um tutorial dedicado a isso, pois envolve girar o drone em múltiplos eixos e pode dar errado se feito incorretamente, prejudicando o Position Hold em vez de ajudar.
Como Usar o Position Hold na Pratica
Testando o Altitude Hold primeiro
Antes de ativar o Position Hold, teste o Altitude Hold sozinho. Com o Altitude Hold ativado, o drone entra em algo semelhante ao Angle Mode, mas com controle automático de throttle. O stick de throttle centralizado mantém a altitude fixa.
Se o drone subir ou descer bruscamente ao ativar, ajuste o valor de ap_hover_throttle. Não espere estabilidade de altitude no nível DJI; uma oscilação de aproximadamente 1 metro é considerada normal.
Usando o Position Hold com bússola
Com magnetômetro ativado e calibrado, você pode acionar o Position Hold a qualquer momento do voo, desde que tenha lock de GPS com pelo menos 8 satélites antes da decolagem.
O modo POSH aparece no OSD quando ativo. Você ainda pode mover o drone com pitch, roll e yaw, mas a resposta dos sticks é significativamente reduzida em comparação ao Angle Mode normal.
Usando o Position Hold sem bússola
Sem bússola, o Position Hold não fica disponível imediatamente após a decolagem. Se você tentar ativar cedo demais, verá o erro POSHOLD FAIL no OSD.
Para resolver, voe em linha reta por alguns segundos antes de ativar. O Betaflight precisa de movimento linear para estimar o heading via GPS. Verifique a seta Home Direction no OSD: se ela apontar na direção correta, o Position Hold está pronto para ser ativado.
Nos meus testes, o Position Hold sem bússola funcionou de forma surpreendentemente estável por mais de 7 minutos. Se eventualmente o heading começar a derivar, desative o modo, voe reto por um trecho e reative.
Aprender FPV no modo difícil — tentativa e erro, vídeos desconexos, sem feedback — é opcional. Existe uma forma melhor.
Position Hold vs Botao de Panico do DJI
Uma comparação inevitável. No DJI Avata 2, por exemplo, o botão de pânico freia e para o drone quase instantaneamente. O Position Hold do Betaflight faz algo similar, mas a frenagem não é tão agressiva, especialmente se você estiver voando rápido.
Se quiser uma frenagem mais forte, aumente o valor de ap_max_angle. O padrão é 50 graus e o máximo é 70. Valores mais altos significam frenagem mais agressiva, com o drone inclinando mais para desacelerar.
Problemas Comuns e Como Resolver
O drone não arma
Você não pode armar o drone com o Position Hold ou Altitude Hold já ativados. Certifique-se de que ambos os modos estão desligados antes de armar.
Altitude oscilando
Uma variação de aproximadamente 1 metro é normal. O Betaflight usa apenas o barômetro para estimar altitude, diferente dos drones DJI que combinam LiDAR e sensores de câmera. Vento e velocidade alta também causam erros, pois o fluxo de ar sobre o barômetro altera a leitura de pressão. Uma solução é cobrir o barômetro com um pedaço pequeno de espuma de célula aberta.
Erro POSHOLD FAIL no OSD
Causas mais comuns:
- Sem bússola e sem ter voado reto o suficiente para estabelecer o heading
- Poucos satélites GPS com lock
Drone sai voando em ângulo estranho ou fazendo círculos
A informação de heading está incorreta. Se você não usa magnetômetro, desative o Position Hold, voe reto por 50 a 100 metros em velocidade constante sem input de roll ou yaw e tente novamente.
Bússola menos precisa em drones menores
Em drones menores como cinewhoops de 3 polegadas, o magnetômetro tende a ser menos preciso do que em quads de 5 polegadas. Isso acontece porque o GPS fica necessariamente mais perto dos motores, fios e outras fontes de interferência no frame menor.
Perguntas Frequentes
O Position Hold funciona sem GPS?
Não. O GPS é o componente obrigatório para o Position Hold. Sem ele, o Betaflight não tem como saber a posição do drone no espaço. Já o Altitude Hold pode funcionar apenas com barômetro, sem GPS.
Posso usar o Position Hold em um Tiny Whoop?
Teoricamente sim, desde que você consiga montar um módulo GPS no whoop. Na prática, o peso e o espaço limitado tornam isso um desafio. Funciona melhor em drones de 3 polegadas ou maiores.
O Position Hold substitui o GPS Rescue?
Não. São funcionalidades complementares. O GPS Rescue traz o drone de volta para o ponto de decolagem automaticamente em caso de perda de sinal. O Position Hold apenas mantém o drone parado em um ponto. Configure ambos.
Preciso recalibrar a bússola em cada local de voo?
O ideal é recalibrar quando você muda significativamente de local geográfico, pois o campo magnético da Terra varia entre regiões. Para voos no mesmo local ou em áreas próximas, não precisa recalibrar sempre.
O Altitude Hold funciona sem barômetro e sem GPS?
Não na versão atual do Betaflight. Você precisa de pelo menos um GPS ou um barômetro para que o Altitude Hold tenha dados de referência de altitude.
Qual a precisão do Position Hold no Betaflight?
Segundo os desenvolvedores do Betaflight, uma deriva de até 1 metro é considerada normal. Em condições ideais, com bom lock de GPS e pouco vento, o drone se mantém bastante estável, mas não espere a mesma precisão centimétrica de um DJI.
Position Hold: Recurso Poderoso, Mas Com Ressalvas
O Position Hold do Betaflight é uma adição genuinamente útil ao arsenal de qualquer piloto FPV. Quando funciona, funciona muito bem. Porém, houve momentos nos meus testes em que o drone oscilava, vagava lentamente ou simplesmente não se comportava como esperado.
Minha recomendação: use-o principalmente como recurso de segurança. Aquele momento em que você precisa tirar os óculos por um instante, colocar o rádio no chão ou lidar com uma situação inesperada. Esse uso sozinho já pode ser um salva-vidas. Mas não confie no Position Hold para pairar sobre pessoas sem estar ativamente controlando o drone. Teste bastante em campo aberto e sem riscos antes de depender dele em situações reais. O bom senso continua sendo o melhor recurso de segurança que um piloto FPV pode ter.
Não se esqueça de se inscrever no nosso canal do Youtube para mais conteúdos e dicas sobre drones de FPV.
Conheça nossos Cursos e Formações em Drones de FPV. Saiba mais…
#fpv #dronefpv #drone #academiadofpv #dronedefpv #cursodedrone #droneracer #filmagemcomfpv #montardronefpv #cursodrone #cursodronefpv #positionhold #betaflight #altitudehold #gpsdrone #gpsfpv #configuraçãobetaflight #dronelongrange #cinewhoop #magnetometro #calibracaodrone





